-
 新疆智能鋼筋加工機器人設備
新疆智能鋼筋加工機器人設備試車時,示教程序、夾具、邏輯控制器等各種要素中可能存在設計錯誤、示教錯誤、工作錯誤。因此,進行試車作業時必須進一步提高安全意識。請注意以下各點:首先,確認緊急停止按鈕、保持/運行開關等用于停止機器人的按鈕、開關、信號的動作。一旦發生危險情況,若無法停止機器人將...
2025-05-04 -
 貴州數控鋼筋鋼筋籠焊接工作站生產廠家
貴州數控鋼筋鋼筋籠焊接工作站生產廠家設備設計時按照7*24小時工作時間,極大的提高了生產效率,成為工程進度推進強有力的支持者。正常焊接過程中可以無需人員留守,從而使操作人員可以進行其它準備任務,降低工人的勞動強度。產品極強的智能化設計可極大的減少人員的誤操作,幾分鐘即可熟悉設備操作。成都華研機器...
2025-05-04 -
 云南固特滾焊機自動焊接機器人保養
云南固特滾焊機自動焊接機器人保養定期檢修時的注意事項1)檢修作業必須由接受過本公司機器人學校維修保養培訓的人員進行。2)進行檢修作業之前,請對作業所需的零件、工具和圖紙進行確認。3)更換零件請使用本公司指定的零件。4)進行機器人本體的檢修時,請務必先切斷電源再進行作業。5)打開控制裝置的門時...
2025-05-04 -
 山東橋梁鋼筋籠焊接工作站廠家
山東橋梁鋼筋籠焊接工作站廠家風險提示示例:指揮信號不明確現場作業人員需要根據吊裝指揮的信號執行吊裝操作,指揮人員必須具備相關的從業資格,并經過培訓。每次吊裝都必須有專人指揮,操作人員對指揮信號不明確、不理解,都拒絕起吊。同時要避免多人指揮的情況,指揮信號一旦混亂就容易引發事故。吊埋在地下...
2025-05-04 -
 云南智能全自動彎箍機廠
云南智能全自動彎箍機廠7.計算預制鋼筋混凝土樁的工程量時是否扣除樁尖的虛體積部分?答:打預制鋼筋混凝土樁的體積,包括鉆孔灌注樁的工程量計算時,均按設計樁長乘以樁截面面積計算。不扣除樁尖的虛體積,但計算管樁的工程量時,需要扣除空心管樁的空心部分,如果管樁的空心部分按設計要求需要灌注混...
2025-05-04 -
 云南橋梁鋼筋籠焊接工作站售后服務
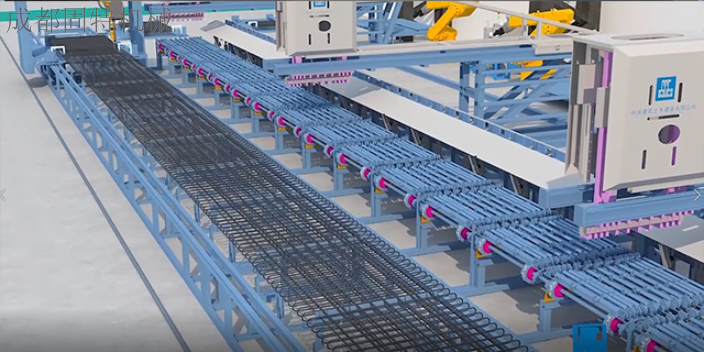
云南橋梁鋼筋籠焊接工作站售后服務在對設備位置進行規劃時請參照如上視圖中所標示的尺寸。全自動鋼筋籠焊接工作站設備占地:長30米,寬8.5米。繞筋機一側需考慮繞筋的吊裝高度(小起吊高度5.5米)及起吊設備與墻壁的小距離(小距離1.5米)保證繞筋可以進行吊裝;主筋上料側需考慮主筋的吊裝高度(3米)...
2025-05-04 -
 新疆大型鋼筋加工機器人怎么樣
新疆大型鋼筋加工機器人怎么樣信息說明:1、機頭位置自動設定:點擊此處按鈕彈出機頭位置自動設定對話框。2、機頭電動出:在“手動中”狀態時點擊該按鈕機頭向外伸出。3、機頭電控回:在“手動中”狀態時點擊該按鈕機頭向內收回。4、保存為焊接位:作用是保存機頭目前的位置,當點擊此按鈕機頭向內收回,并...
2025-05-04 -
 山東全自動數控鋼筋籠焊接工作站哪家強
山東全自動數控鋼筋籠焊接工作站哪家強伺服電機回原點超時故障報警邏輯:執行伺服回原點動作后,到達設定的時間還是未完成回原點。導致報警原因:①、原點感應器異常;②、伺服電機連接運動結構的連接件損壞脫離;③、回原點速度過低;④、伺服電機異常;⑤、PLC輸出的脈沖和方向信號未到達伺服電機處。報警處理方法...
2025-05-04 -
 河南智能數控鋼筋籠焊接工作站
河南智能數控鋼筋籠焊接工作站內圈力矩過大異常,請確認出筋是否異常報警邏輯:執行繞筋的過程中,中心軸伺服的力矩超過了設定的力矩。此報警一般為繞筋處出筋異常導致。導致報警原因:①、繞筋處出筋異常,速度慢于中心軸速度;②、出筋上下方選擇異常;③、設定報警力矩過小和報警持續時間過短報警處理方法:...
2025-05-04 -
 重慶綠色環保的全自動鋼筋桁架焊接生產線好不好用
重慶綠色環保的全自動鋼筋桁架焊接生產線好不好用鋼筋桁架板,大家可能一頭霧水,這是什么鬼呢?其實,就算土木行業的人,如果不是搞鋼結構的,也不是很清楚的。鋼筋桁架板,誕生于2007年左右,據說是新進德國的工藝,當時耗資巨大,也想替代樓承板或者爭奪樓承板市場吧。這種材料和樓承板的作用類似,也是用于樓面使用。不同...
2025-05-04 -
 天津全自動數控彎箍接料機器人
天津全自動數控彎箍接料機器人定期檢查電力配線的接線部位。入力側、出力側等端子,以及外部配線的接線部位,內部配線的接線部位等部位的接線螺絲是否有松動,生銹時要把銹除去使接觸導電良好。焊機長期的使用難免會使外殼因碰接而變形,生銹而受損傷,內部零件也會消磨,因此在年度的保養和檢查時要實施不良品...
2025-05-04 -
貴州地鐵鋼筋籠焊接工作站批發
內圈液壓和中心小車手動操作:①手動強制開關:進行內圈液壓手動時,會有一定的限制條件,點擊此強制按鈕后,則屏蔽相應的條件,點擊此強制按鈕需要一定的權限。②安裝內圈:按照設定的安裝內圈時間,進行內圈液壓伸出動作。③內圈液壓伸出:手動進行內圈液壓的伸出動作。④內圈液...
2025-05-04 -
河南固特機械鋼筋籠焊接工作站維修電話
在對設備位置進行規劃時請參照如上視圖中所標示的尺寸。全自動鋼筋籠焊接工作站設備占地:長30米,寬8.5米。繞筋機一側需考慮繞筋的吊裝高度(小起吊高度5.5米)及起吊設備與墻壁的小距離(小距離1.5米)保證繞筋可以進行吊裝;主筋上料側需考慮主筋的吊裝高度(3米)...
2025-05-04 -
 天津智能鋼筋籠焊接工作站怎么樣
天津智能鋼筋籠焊接工作站怎么樣在對設備位置進行規劃時請參照如上視圖中所標示的尺寸。全自動鋼筋籠焊接工作站設備占地:長30米,寬8.5米。繞筋機一側需考慮繞筋的吊裝高度(小起吊高度5.5米)及起吊設備與墻壁的小距離(小距離1.5米)保證繞筋可以進行吊裝;主筋上料側需考慮主筋的吊裝高度(3米)...
2025-05-03 -
四川固特機械數控鋼筋籠焊接工作站技術指導
設備設計時按照7*24小時工作時間,極大的提高了生產效率,成為工程進度推進強有力的支持者。正常焊接過程中可以無需人員留守,從而使操作人員可以進行其它準備任務,降低工人的勞動強度。產品極強的智能化設計可極大的減少人員的誤操作,幾分鐘即可熟悉設備操作。成都華研機器...
2025-05-03 -
 新疆機場鋼筋籠焊接工作站按需定制
新疆機場鋼筋籠焊接工作站按需定制伺服電機回原點超時故障報警邏輯:執行伺服回原點動作后,到達設定的時間還是未完成回原點。導致報警原因:①、原點感應器異常;②、伺服電機連接運動結構的連接件損壞脫離;③、回原點速度過低;④、伺服電機異常;⑤、PLC輸出的脈沖和方向信號未到達伺服電機處。報警處理方法...
2025-05-03 -
 四川地鐵鋼筋加工輔助機器人售后服務
四川地鐵鋼筋加工輔助機器人售后服務隨著國家對基礎設施以及其他建筑質量的要求日益嚴格,傳統的以工人手工為主的鋼筋加工模式正被逐步淘汰,取而代之的是自動化、專業化、標準化的加工工藝。在電腦上輸入鋼筋長度、彎箍角度、彎箍速度等參數,點擊開啟按鈕,經過機器人齒輪的帶動、彎曲、切割,一條條鋼筋依次由條狀...
2025-05-03 -
 湖南全自動鋼筋籠焊接工作站哪家強
湖南全自動鋼筋籠焊接工作站哪家強操作步驟介紹:進入鋼筋籠規格選擇畫面:①、點擊主筋主頁面按鈕,進入[主筋主頁面]畫面,如圖4-3-1;②、點擊主筋設置向導按鈕,進入[主筋設置向導]畫面,如圖4-3-2;③、點擊鋼筋籠規格設置頁按鈕進入[鋼筋籠規格選擇參數]頁面,如圖4-3-3。進入鋼筋籠規格...
2025-05-03 -
 云南滾焊機自動焊接機器人設備
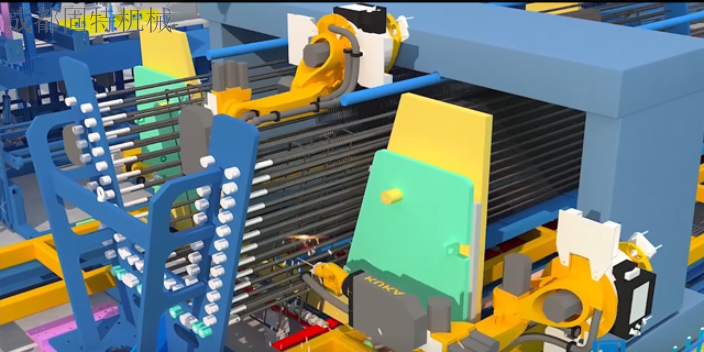
云南滾焊機自動焊接機器人設備產品具有如下特點:1、速度快:能完全匹配鋼筋籠盤絲機。2、質量穩定:機械化作業不受人為因素影響,長時間工作可穩定質量不變。3、適合各種主筋箍筋數量、形式、型號、大小、長度的設計要求,不會因設備功能而影響鋼筋籠設計和施工現場分散的機動作業。4、運轉便捷:組合式設...
2025-05-03 -
 河南房建鋼筋加工輔助機器人使用指導
河南房建鋼筋加工輔助機器人使用指導以機械代替人工、實現建筑施工自動化與智能化,是建筑施工領域的發展趨勢。到目前為止,這一趨勢已經在三個方面呈現出來:一是建筑施工的工廠化與裝配化,以鋼結構建筑為;二是在各個施工環節使用自動化施工機械,如自動砌墻機、自動抹灰機、自動噴涂機等;三是智能化施工機械和相...
2025-05-03 -
湖南固特鋼筋籠焊接工作站案例
繞筋過程中機頭未在安全位異常報警邏輯:執行繞筋的過程中,有焊接機頭的安全位未收到。導致報警原因:①、焊接機頭被人為動作,未退回到原點位置;②、焊接機頭原點感應器異常;③、焊接機頭和主控通訊異常;報警處理方法:第一步,確認是否因為人為動作了焊接機頭伺服電機導致伺...
2025-05-03 -
 甘肅裝配式全自動鋼筋桁架焊接生產線哪里買
甘肅裝配式全自動鋼筋桁架焊接生產線哪里買鋼筋桁架樓承板為什么受歡迎?在了解鋼筋桁架樓承板受歡迎的原因之前,我們先了解一下什么是鋼筋桁架樓承板。鋼筋桁架樓承板是由鋼筋、桁架、樓承板組成,在壓型樓承板的基礎上改進而來,是一種新興建筑材料。鋼筋桁架樓承板是將樓板中的鋼筋在工廠采用進口設備加工成鋼筋桁架,并...
2025-05-03 -
 成都地基鋼筋加工輔助機器人廠家
成都地基鋼筋加工輔助機器人廠家命令與回授超過比較大誤差/靜止時命令與回授超過比較大誤差出現原因:此類報警也有可能其它軸報警。命令值與編碼器回授值過大。/靜止時命令與回授超過比較大誤差。解決方法:1)在齒輪比頁檢查參數:移動時比較大落后(u),此參數一般設為20000。設太小是不對的。靜止時...
2025-05-03 -
 四川本地鐵路箱梁自動生產線設備
四川本地鐵路箱梁自動生產線設備桿件恒載內力(軸向力)的計算,可參照現有設計資料,先估算作用在橋跨結構上的恒載(主桁、橋面系和橋面的重力),然后按平面桁架進行。在計算活載內力之前,需先繪制各桿件的內力影響線并計算相應影響線面積。連續鋼桁梁橋連續鋼桁梁橋的特點連續桁架橋具有下列優點①便于采用伸...
2025-05-03 -
貴州大型鋼筋加工輔助機器人廠家
潤滑油的檢查每運轉5,000小時或毎隔1年,請測量減速機的潤滑油鐵粉濃度。超出標準值時,有必要更換潤滑油,請聯系本公司服務中心。檢查工具:潤滑油鐵粉濃度計,推薦潤滑油鐵粉濃度計:型號OM-810;潤滑油的添加潤滑油的加油口位置;潤滑油的更換更換步驟如下:1)切...
2025-05-03 -
新疆智能鋼筋加工機器人廠
提示路徑所要執行之檔案不存在原因:此報警為在執行程序調用子程序時,不存在設定編號的子程序。(矩陣碼垛中經常有忽略末端效應器設置呼叫子程序的編號造成此警報)解決方法:1)檢查呼叫子程序的指令(檔案呼叫)中呼叫的子程序類型。類型有:程序列表,O檔,G檔。然后檢查設...
2025-05-03 -
 天津固特鋼筋籠焊接工作站設備
天津固特鋼筋籠焊接工作站設備報警信息及處理方法(1)氣缸報警報警邏輯:氣缸當前動作狀態(輸出)和氣缸感應器狀態(輸入)不一致達到一定的時間會出現此報警。導致報警原因:①、感應器位置異常;②、感應器損壞;③、有異物阻擋異常;④、氣壓(0.4-0.7MP之間)或氣缸或氣路異常;⑤、電磁閥異常...
2025-05-03 -
 浙江頂板筋箱梁生產線一體化
浙江頂板筋箱梁生產線一體化鋼桁架加勁PC連續箱梁橋的BIM建模技術鋼桁架加勁PC連續箱梁橋的BIM建模技術朱奕蓓1,程耀東1,謝李釗2(1.蘭州交通大學甘肅省道路橋梁與地下工程重點實驗室,蘭州730070;2.蘭州交通大學道橋工程災害防治技術國家地方聯合工程實驗室,蘭州730070)摘...
2025-05-03 -
 新疆鋼筋籠焊接工作站設備
新疆鋼筋籠焊接工作站設備在對設備位置進行規劃時請參照如上視圖中所標示的尺寸。全自動鋼筋籠焊接工作站設備占地:長30米,寬8.5米。繞筋機一側需考慮繞筋的吊裝高度(小起吊高度5.5米)及起吊設備與墻壁的小距離(小距離1.5米)保證繞筋可以進行吊裝;主筋上料側需考慮主筋的吊裝高度(3米)...
2025-05-03 -
 北京物聯網技術的鐵路箱梁自動生產線好不好用
北京物聯網技術的鐵路箱梁自動生產線好不好用摘要:隨著工業科技的發展,我國建筑行業的施工技術也在不斷得到改善,產生了許多新型施工手法。在新技術源源不斷涌現的現在,具有預應力性質的鋼筋混凝土材料建設的連續箱梁橋得到guang泛的關注和使用,使工程的施工質量得到改善。本文對于預應力鋼筋混凝土連續箱梁橋施工工...
2025-05-03