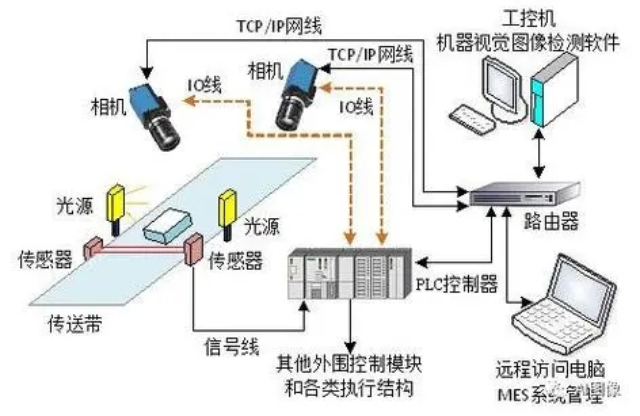
奉賢區(qū)什么是機(jī)器視覺系統(tǒng)結(jié)構(gòu)圖
⒎本系統(tǒng)可通過顯示圖像監(jiān)視檢測(cè)過程,也可通過界面顯示的檢測(cè)數(shù)據(jù)動(dòng)態(tài)查看檢測(cè)結(jié)果;⒏具有對(duì)錯(cuò)誤工件及時(shí)準(zhǔn)確發(fā)出剔除控制信號(hào)、剔除廢品的功能;⒐系統(tǒng)能夠自檢其主要設(shè)備的狀態(tài)是否正常,配有狀態(tài)指示燈;同時(shí)能夠設(shè)置系統(tǒng)維護(hù)人員、使用人員不同的操作權(quán)限;⒑實(shí)時(shí)顯示檢測(cè)畫面,中文界面,可以瀏覽幾次不合格品的圖像,具有能夠存儲(chǔ)和實(shí)時(shí)察看錯(cuò)誤工件圖像的功能;⒒能生成錯(cuò)誤結(jié)果信息文件,包含對(duì)應(yīng)的錯(cuò)誤圖像,并能打印輸出。有些采集卡有內(nèi)置的數(shù)字輸入以觸發(fā)采集卡進(jìn)行捕捉,當(dāng)采集卡抓拍圖像時(shí)數(shù)字輸出口就觸發(fā)閘門。奉賢區(qū)什么是機(jī)器視覺系統(tǒng)結(jié)構(gòu)圖

用邊緣檢測(cè)技術(shù)來確定輪廓線,用區(qū)域分析技術(shù)將圖像劃分為由灰度相近的像素組成的區(qū)域,這些技術(shù)統(tǒng)稱為圖像分割。其目的在于用輪廓線和區(qū)域?qū)λ治龅膱D像進(jìn)行描述,以便同機(jī)內(nèi)存儲(chǔ)的模型進(jìn)行比較匹配。實(shí)踐表明,只用自底向上的分析太困難,必須同時(shí)采用自頂向下,即把目標(biāo)分為若干子目標(biāo)的分析方法,運(yùn)用啟發(fā)式知識(shí)對(duì)對(duì)象進(jìn)行預(yù)測(cè)。這同言語理解中采用的自底向上和自頂向下相結(jié)合的方法是一致的。在圖像理解研究中,A.古茲曼提出運(yùn)用啟發(fā)式知識(shí),表明用符號(hào)過程來解釋輪廓畫的方法不必求助于諸如**小二乘法匹配之類的數(shù)值計(jì)算程序。松江區(qū)威力機(jī)器視覺系統(tǒng)怎么樣可見光的缺點(diǎn)是光能不能保持穩(wěn)定。
?視覺工具的性能是否可滿足我們的要求同樣的視覺工具,不同的廠家可能實(shí)現(xiàn)的原理不一樣,從而表現(xiàn)出來的性能也不一樣。我們可以想一些辦法來測(cè)試比較。如對(duì)定位功能,我們可以采用以下條件的變化來加以測(cè)試對(duì)比,觀察不同產(chǎn)品在條件變化下哪個(gè)穩(wěn)定性更強(qiáng),得分值更高。?零件旋轉(zhuǎn)?光學(xué)測(cè)量裝置的變化?光照條件的不一致?零件外觀部分遮蓋?視覺和軟件工具使用是否方便有些視覺和軟件功能參數(shù)設(shè)置簡單明了,使用氣力愛非常方便,有些產(chǎn)品的視覺和軟件功能參數(shù)設(shè)置復(fù)雜,有些參數(shù)甚至沒有明確的意義,使用起來比較費(fèi)事。
結(jié)果處理和控制應(yīng)用程序把返回的結(jié)果存入數(shù)據(jù)庫或用戶指定的位置,并根據(jù)結(jié)果控制機(jī)械部分做相應(yīng)的運(yùn)動(dòng)。根據(jù)識(shí)別的結(jié)果,存入數(shù)據(jù)庫進(jìn)行信息管理。以后可以隨時(shí)對(duì)信息進(jìn)行檢索查詢,管理者可以獲知某段時(shí)間內(nèi)流水線的忙閑,為下一步的工作作出安排;可以獲知內(nèi)布匹的質(zhì)量情況等等。在國外,機(jī)器視覺的應(yīng)用普及主要體現(xiàn)在半導(dǎo)體及電子行業(yè),其中大概40%-50%都集中在半導(dǎo)體行業(yè)。具體如PCB印刷電路:各類生產(chǎn)印刷電路板組裝技術(shù)、設(shè)備;單、雙面、多層線路板,覆銅板及所需的材料及輔料;輔助設(shè)施以及耗材、油墨、藥水藥劑、配件;結(jié)構(gòu)光照明是將光柵或線光源等投射到被測(cè)物上,根據(jù)它們產(chǎn)生的畸變,解調(diào)出被測(cè)物的三維信息。
⒈ 檢測(cè):又可分為高精度定量檢測(cè)(例如顯微照片的細(xì)胞分類、機(jī)械零部件的尺寸和位置測(cè)量)和不用量器的定性或半定量檢測(cè)(例如產(chǎn)品的外觀檢查、裝配線上的零部件識(shí)別定位、缺陷性檢測(cè)與裝配完全性檢測(cè))。⒉機(jī)器人視覺:用于指引機(jī)器人在大范圍內(nèi)的操作和行動(dòng),如從料斗送出的雜亂工件堆中揀取工件并按一定的方位放在傳輸帶或其他設(shè)備上(即料斗揀取問題)。至于小范圍內(nèi)的操作和行動(dòng),還需要借助于觸覺傳感技術(shù)。此外還有:1自動(dòng)光學(xué)檢查2人臉識(shí)別3無人駕駛汽車4產(chǎn)品質(zhì)量等級(jí)分類5印刷品質(zhì)量自動(dòng)化檢測(cè)6文字識(shí)別7紋理識(shí)別8追蹤定位例如,可以連接8個(gè)不同的攝像機(jī),然后告訴采集卡采用那一個(gè)相機(jī)抓拍到的信息。松江區(qū)威力機(jī)器視覺系統(tǒng)怎么樣
按掃描方式劃分,可分為行掃描相機(jī)(線陣相機(jī))和面掃描相機(jī)(面陣相機(jī))兩種方式;奉賢區(qū)什么是機(jī)器視覺系統(tǒng)結(jié)構(gòu)圖
高速相機(jī)相機(jī)(2張)按照不同標(biāo)準(zhǔn)可分為:標(biāo)準(zhǔn)分辨率數(shù)字相機(jī)和模擬相機(jī)等。要根據(jù)不同的實(shí)際應(yīng)用場(chǎng)合選不同的相機(jī)和高分辨率相機(jī):按成像色彩劃分,可分為彩色相機(jī)和黑白相機(jī);按分辨率劃分,像素?cái)?shù)在38萬以下的為普通型,像素?cái)?shù)在38萬以上的高分辨率型;按光敏面尺寸大小劃分,可分為1/4、1/3、1/2、1英寸相機(jī);按掃描方式劃分,可分為行掃描相機(jī)(線陣相機(jī))和面掃描相機(jī)(面陣相機(jī))兩種方式;(面掃描相機(jī)又可分為隔行掃描相機(jī)和逐行掃描相機(jī));奉賢區(qū)什么是機(jī)器視覺系統(tǒng)結(jié)構(gòu)圖
上海翌優(yōu)自動(dòng)化科技有限公司匯集了大量的優(yōu)秀人才,集企業(yè)奇思,創(chuàng)經(jīng)濟(jì)奇跡,一群有夢(mèng)想有朝氣的團(tuán)隊(duì)不斷在前進(jìn)的道路上開創(chuàng)新天地,繪畫新藍(lán)圖,在上海市等地區(qū)的機(jī)械及行業(yè)設(shè)備中始終保持良好的信譽(yù),信奉著“爭(zhēng)取每一個(gè)客戶不容易,失去每一個(gè)用戶很簡單”的理念,市場(chǎng)是企業(yè)的方向,質(zhì)量是企業(yè)的生命,在公司有效方針的領(lǐng)導(dǎo)下,全體上下,團(tuán)結(jié)一致,共同進(jìn)退,**協(xié)力把各方面工作做得更好,努力開創(chuàng)工作的新局面,公司的新高度,未來 翌優(yōu)科技和您一起奔向更美好的未來,即使現(xiàn)在有一點(diǎn)小小的成績,也不足以驕傲,過去的種種都已成為昨日我們只有總結(jié)經(jīng)驗(yàn),才能繼續(xù)上路,讓我們一起點(diǎn)燃新的希望,放飛新的夢(mèng)想!
- 奉賢區(qū)工程自動(dòng)化控制系統(tǒng)對(duì)比 2025-05-09
- 松江區(qū)特定機(jī)器視覺系統(tǒng)現(xiàn)貨 2025-05-09
- 青浦區(qū)威力機(jī)器視覺系統(tǒng)交易價(jià)格 2025-05-09
- 寶山區(qū)新能源自動(dòng)化控制系統(tǒng)編號(hào) 2025-05-08
- 松江區(qū)特定自動(dòng)化控制系統(tǒng)誠信為本 2025-05-08
- 黃浦區(qū)品質(zhì)機(jī)器視覺系統(tǒng)執(zhí)行標(biāo)準(zhǔn) 2025-05-08
- 奉賢區(qū)什么是機(jī)器視覺系統(tǒng)結(jié)構(gòu)圖 2025-05-08
- 楊浦區(qū)小型機(jī)器視覺系統(tǒng)價(jià)格表格 2025-05-08
- 長寧區(qū)小型機(jī)器視覺系統(tǒng)現(xiàn)貨 2025-05-08
- 金山區(qū)小型自動(dòng)化控制系統(tǒng)采購信息 2025-05-08
- 貴州干式真空泵銷售 2025-05-09
- 浙江光大蝶閥型號(hào) 2025-05-09
- 青島數(shù)控火焰等離子切割機(jī)廠商 2025-05-09
- 晉江高溫消失墨水鞋面劃線噴墨閥要多少錢 2025-05-09
- 伊春公共空間裝飾設(shè)計(jì) 2025-05-09
- 南昌全地形履帶式機(jī)器人 2025-05-09
- 錫山區(qū)銷售金屬制品參考價(jià) 2025-05-09
- 杭州國磊數(shù)字板卡精選廠家 2025-05-09
- 南京工業(yè)物聯(lián)網(wǎng)解決方案有幾種 2025-05-09
- 寧德工業(yè)油霧凈化器 2025-05-09