-
惟精環(huán)境藻類智能分析監(jiān)測系統(tǒng),為水源安全貢獻科技力量!
-
快來擁抱無線遠程打印新時代,惟精智印云盒、讓打印變得如此簡單
-
攜手共進,惟精環(huán)境共探環(huán)保行業(yè)發(fā)展新路徑
-
惟精環(huán)境:科技賦能,守護綠水青山
-
南京市南陽商會新春聯(lián)會成功召開
-
惟精環(huán)境順利通過“江蘇省民營科技企業(yè)”復評復審
-
“自動?化監(jiān)測技術(shù)在水質(zhì)檢測中的實施與應用”在《科學家》發(fā)表
-
熱烈祝賀武漢市概念驗證中心(武漢科技大學)南京分中心掛牌成立
-
解鎖流域水質(zhì)密碼,“三維熒光水質(zhì)指紋”鎖定排污嫌疑人!
-
重磅政策,重點流域水環(huán)境綜合治理資金支持可達總投資的80%
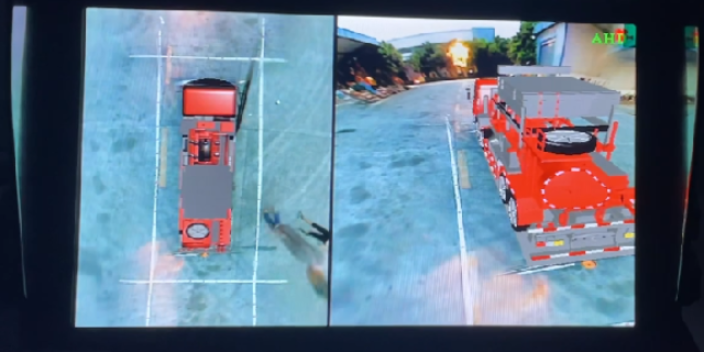
北京吊車360鳥瞰全景影像
(下篇)AI360全景影像系統(tǒng)通過一系列高科技手段,實現(xiàn)了對工程車全盲區(qū)、半盲區(qū)的無死角環(huán)視,以下是具體處理方法:
數(shù)據(jù)融合:將雷達傳感器檢測到的障礙物、行人等信息與全景畫面進行融合,形成更加完整、準確的車身周圍環(huán)境信息。AI智能分析:AI算法對融合后的數(shù)據(jù)進行智能分析,識別潛在風險,如行人靠近、車輛靠近、障礙物阻擋等,并發(fā)出預警。預警提示:將預警信息實時顯示在車內(nèi)顯示器上,并通過聲光警報器提醒駕駛員注意潛在風險,確保駕駛安全。
三、實現(xiàn)效果全盲區(qū)覆蓋:通過高清攝像頭和雷達傳感器的結(jié)合使用,AI360全景影像系統(tǒng)能夠?qū)崿F(xiàn)對工程車全盲區(qū)的有效覆蓋,消除駕駛盲區(qū)帶來的安全隱患。智能預警:AI算法能夠?qū)崟r分析車身周圍環(huán)境信息,識別潛在風險并發(fā)出預警,提高駕駛員的反應速度和準確性。提升安全性:AI360全景影像系統(tǒng)不僅提高了駕駛安全性,還降低了因視覺盲區(qū)導致的交通事故風險,為工程車駕駛員提供更加安全、可靠的駕駛輔助。
綜上所述,AI360全景影像系統(tǒng)通過高清攝像頭、圖像處理器、雷達傳感器、AI智能算法以及車內(nèi)顯示器和警報系統(tǒng)的有機結(jié)合,實現(xiàn)了對工程車全盲區(qū)、半盲區(qū)的無死角環(huán)視和智能預警。 自帶BSD功能AI360全景影像系統(tǒng)能夠?qū)崟r監(jiān)測叉車周圍的盲點區(qū)域,當檢測到有潛在危險時,系統(tǒng)會立即發(fā)出預警.北京吊車360鳥瞰全景影像
工程車360
(下篇)4G360全景影像集成雷達預警及疲勞預警系統(tǒng)在物流車上的應用優(yōu)勢主要體現(xiàn)在以下幾個方面:
當任何一個系統(tǒng)檢測到潛在危險時,都會立即觸發(fā)預警機制,通過多種方式提醒駕駛員,確保行車安全。
三、遠程監(jiān)控與管理,提高運營效率4G遠程監(jiān)控:通過4G網(wǎng)絡,物流車的管理人員可以遠程實時監(jiān)控車輛的行駛狀態(tài)、周圍環(huán)境和駕駛員狀態(tài)等信息。這種遠程監(jiān)控功能有助于管理人員及時了解車輛的運行情況,及時調(diào)度和安排工作任務,提高運營效率。數(shù)據(jù)分析與優(yōu)化:4G360全景影像系統(tǒng)和雷達預警系統(tǒng)可以收集大量的行駛數(shù)據(jù)和環(huán)境數(shù)據(jù),這些數(shù)據(jù)可以用于分析物流車的行駛習慣和潛在風險點,為優(yōu)化行駛路線、提高運輸效率提供有力支持。四、降低運營成本,提升競爭力減少事故損失:通過減少交通事故和因事故導致的車輛損壞、貨物損失等費用,4G360全景影像集成雷達預警及疲勞預警系統(tǒng)有助于降低物流車的運營成本。提高客戶滿意度:安全的行駛和高效的運輸服務有助于提高客戶滿意度,進而提升物流企業(yè)的品牌形象和市場競爭力。綜上所述,4G360全景影像集成雷達預警及疲勞預警系統(tǒng)在物流車上的應用優(yōu)勢主要體現(xiàn)在提升駕駛安全性、減少人為失誤、提高運營效率以及降低運營成本等方面。 深圳吊車360全景環(huán)視設備AI360全景影像系統(tǒng)支持報警錄像自動上傳,結(jié)合GPS定位與時間戳,實現(xiàn)事故現(xiàn)場的精Z還原.

(下篇)智慧云平臺AI360全景影像集成網(wǎng)口輸出及BSD盲區(qū)預警系統(tǒng)因其全M監(jiān)控和實時預警的能力,被廣泛應用于多種工程機械作業(yè)場景中。以下是一些典型的應用場景:
這些系統(tǒng)能夠提供高清的全景畫面和實時的盲區(qū)預警信息,為無人駕駛系統(tǒng)提供準確的感知和決策依據(jù),從而實現(xiàn)更加安全、高效的無人駕駛作業(yè)。
四、惡劣作業(yè)環(huán)境在一些惡劣的作業(yè)環(huán)境中,如礦山、港口等,工程機械常常需要在塵土飛揚、視線不佳的條件下作業(yè)。此時,360全景影像系統(tǒng)的高清夜視廣角攝像頭能夠穿透塵霧,提供清晰的畫面,而BSD盲區(qū)預警系統(tǒng)則能在復雜環(huán)境中實時監(jiān)測并預警潛在的危險,確保作業(yè)安全。
綜上所述,智慧云平臺AI360全景影像集成網(wǎng)口輸出及BSD盲區(qū)預警系統(tǒng)因其全MIAN的監(jiān)控能力和實時的預警功能,在復雜施工環(huán)境、大型基礎建設項目、無人駕駛技術(shù)升級以及惡劣作業(yè)環(huán)境等多種工程機械作業(yè)場景中都有著廣泛的應用。這些系統(tǒng)的應用不僅提高了工程機械的作業(yè)效率和安全性,也為智慧工地的建設提供了有力的技術(shù)支撐。
(上篇)擺臂車安裝360全景影像雷達預警系統(tǒng)的實際應用主要體現(xiàn)在以下幾個方面:
一、提升駕駛安全性360全景影像系統(tǒng):通過布置在擺臂車車身周圍的多個攝像頭,捕獲360度的環(huán)境影像,為駕駛員提供了全MIAN的視野,有效消除了視覺盲區(qū)。駕駛員可以在車內(nèi)清楚地觀察到車輛四周的狀況,特別是在泊車、會車或通過狹窄道路時,能夠大幅提升行車的安全性。雷達預警系統(tǒng):利用電磁波進行環(huán)境探測與距離測量,能夠即時感知車輛周邊環(huán)境,包括路障、其他車輛以及行人。通過發(fā)送微波并接收反射信號進行工作,根據(jù)信號反射的時間和強度,精確計算出障礙物的距離與相對速度,為駕駛員提供預警信息,避免潛在的碰撞風險。
二、增強駕駛便利性360全景影像系統(tǒng):借助全景系統(tǒng),駕駛員可以更容易地判斷車輛與周圍障礙物的距離和位置關系,減少剮蹭和碰撞的風險。在復雜路況下,如人車流量大的路口或集市,駕駛員可以更方便地觀察車輛四周的情況,做出正確的駕駛決策。雷達預警系統(tǒng):雷達預警系統(tǒng)可以實時監(jiān)測車輛周圍的障礙物,并在必要時發(fā)出警報聲,提醒駕駛員注意安全。雷達的測距和測速功能可以協(xié)助駕駛員更好地掌握車輛與周圍環(huán)境的相對位置和運動狀態(tài),提高駕駛的便利性。
360全景影像系統(tǒng)可選配RS485通信接口,用于長距離,高可靠性的數(shù)據(jù)傳輸.
(專輯一)超長平板車實現(xiàn)360全景無縫拼接是一個復雜但重要的過程,它涉及多個步驟和技術(shù)手段。以下是一個概括性的流程,用于指導如何實現(xiàn)這一目標:
一、準備工作設備
選擇適合超長平板車的全景攝像頭系統(tǒng),這些系統(tǒng)通常包括多個廣角或魚眼攝像頭,能夠覆蓋車輛周圍的360度視野。在平板車的適當位置(如車頭、車尾、兩側(cè)等)安裝攝像頭,確保它們能夠無死角地捕捉到車輛周圍的影像。使用調(diào)試布和尺子等工具,對攝像頭進行精確的調(diào)試和校準,以確保它們能夠拍攝到準確且一致的影像。設置車輛的參數(shù),如長寬高、攝像頭離地高度等,以便在后續(xù)的拼接過程中使用。
二、影像采集啟動全景拼接模式
打開車載全景系統(tǒng)的拼接模式,確保所有攝像頭都處于工作狀態(tài)。預覽各攝像頭的成像效果,確保它們都能清晰地捕捉到車輛周圍的影像。在車輛靜止或低速行駛的狀態(tài)下,拍攝一系列相互重疊的照片或視頻幀。這些照片或視頻幀將用于后續(xù)的拼接處理。
三、影像拼接圖像預處理:對采集到的影像進行預處理,包括去噪、增強對比度、調(diào)整亮度等,以提高影像的質(zhì)量。識別并提取影像中的特征點,如角點、邊緣等,這些特征點將用于后續(xù)的匹配和拼接。
4G帶網(wǎng)口360全景影像系統(tǒng)通過車身攝像頭采集圖像,將圖像拼接360度全景,通過4G網(wǎng)絡實時傳輸?shù)竭h程監(jiān)控終端.北京吊車360鳥瞰全景影像
通過云端下發(fā)指令,系統(tǒng)可對車端進行遠程交互控制,監(jiān)控實時作業(yè)情況,提高管理效率.北京吊車360鳥瞰全景影像
(上篇)觸控主動安全預警一體機系統(tǒng)360全景及BSD盲區(qū)預警在挖掘機上的應用,為挖掘機操作帶來了革MING性的安全性能提升。以下是對該系統(tǒng)應用的詳細闡述:
一、系統(tǒng)概述該系統(tǒng)集成了360全景監(jiān)控、BSD盲區(qū)預警、觸控操作等先進技術(shù),通過高清攝像頭、傳感器和智能算法,實時監(jiān)測挖掘機周圍的環(huán)境,為駕駛員提供全方WEI、無死角的視野,并預警潛在的碰撞風險。
二、360全景監(jiān)控攝像頭布置:在挖掘機的關鍵位置安裝多個高清攝像頭,如機身前后左右及頂部,確保360度無死角監(jiān)控。圖像拼接:利用先進的圖像拼接技術(shù),將多個攝像頭捕捉到的畫面實時拼接成一幅完整的全景圖像。觸控顯示:駕駛員通過觸控10寸顯示屏,可以直觀地查看挖掘機周圍的全景畫面,了解周圍環(huán)境的變化。
三、BSD盲區(qū)預警盲區(qū)監(jiān)測:BSD盲區(qū)預警系統(tǒng)能夠?qū)崟r監(jiān)測挖掘機前后左右的盲區(qū),這些區(qū)域通常是駕駛員視線范圍之外的地方。智能識別:利用AI算法對攝像頭捕捉到的圖像進行智能識別,能夠準確判斷盲區(qū)內(nèi)的障礙物、行人或車輛等目標。多級預警:當系統(tǒng)檢測到盲區(qū)內(nèi)有潛在碰撞風險時,會通過聲音、顏色提示、震動等多種方式向駕駛員發(fā)出預警,確保駕駛員能夠及時采取避讓措施。
北京吊車360鳥瞰全景影像
- 河南叉車主動安全預警系統(tǒng)技術(shù)解決方案 2025-06-20
- 北京云臺主動安全預警系統(tǒng)開發(fā)平臺 2025-06-20
- 裝載機360全車可視系統(tǒng)采購 2025-06-19
- 深圳壓路車360全景影像 2025-06-19
- 浙江360度全景影像 2025-06-19
- 深圳裝載機8路360全景 2025-06-19
- 北京吊車360鳥瞰全景影像 2025-06-19
- 上海360鳥瞰全景影像廠家 2025-06-19
- 云南4G通信主動安全預警系統(tǒng)廠家供應 2025-06-19
- 江蘇裝載機360全景可視系統(tǒng) 2025-06-19
- 江蘇汽車座椅前后調(diào)節(jié)開關 2025-06-20
- 濱州改燈改裝 2025-06-20
- 導電性導電膠ConshieldVK8101包裝 2025-06-20
- 北京ADAS駕駛輔助設備廠商 2025-06-20
- 宿遷德莎64284mopp膠帶供應商 2025-06-20
- 蚌埠定制出入口控制設備規(guī)格尺寸 2025-06-20
- 湖州封箱PVC膠帶價格 2025-06-20
- 杭州選購雙色注塑價格 2025-06-20
- 濟南更換LED大燈電話 2025-06-20
- 泉州德莎遮蔽PVC膠帶定做 2025-06-20