寧波食品伺服電動缸
高速伺服電動缸以其極快的響應速度和運動速度,滿足了高速加工、快速定位等應用場景的需求;大推力伺服電動缸則以其強大的推力輸出,確保了設備在重載或高阻力環境下的穩定運行。兩者在性能上不斷突破極限,為工業自動化、航空航天等領域提供了更加高效、可靠的驅動解決方案。工作原理上,高速伺服電動缸采用高性能伺服電機和優化的傳動機構,提高運動速度和響應速度;大推力伺服電動缸則通過增大電機功率和優化機械結構,提高推力輸出和穩定性。這些高性能伺服電動缸的應用,推動了相關領域的技術進步和產業升級。防爆伺服電動缸在易燃易爆環境中,確保設備安全運行。寧波食品伺服電動缸
航天伺服電動缸在航天領域同樣具有重要地位。其作用在于為航天器的姿態控制、有效載荷的展開與回收等關鍵任務提供精確的運動控制。工作原理上,航天伺服電動缸采用特殊設計的伺服電機和傳動機構,以適應太空環境的極端條件。其高精度、高響應速度的特點確保了航天器在太空中的精確操作和穩定運行。在衛星、火箭等航天器的研制和發射過程中,航天伺服電動缸的應用為探索宇宙提供了有力支持。盡管各類伺服電動缸在應用領域和工作原理上有所差異,但它們都具備高精度、高響應速度、高可靠性等共性優勢。這些優勢使得伺服電動缸在工業自動化、航空航天、人形機器人等多個領域得到了普遍應用。未來,隨著技術的不斷進步和應用需求的不斷提高,伺服電動缸將朝著更高精度、更高速度、更智能化方向發展。同時,新材料、新工藝的應用也將進一步提升伺服電動缸的性能和可靠性,為相關產業的發展注入新的活力。大連工業伺服電動缸伺服電動缸的負載能力滿足不同應用場景的需求。
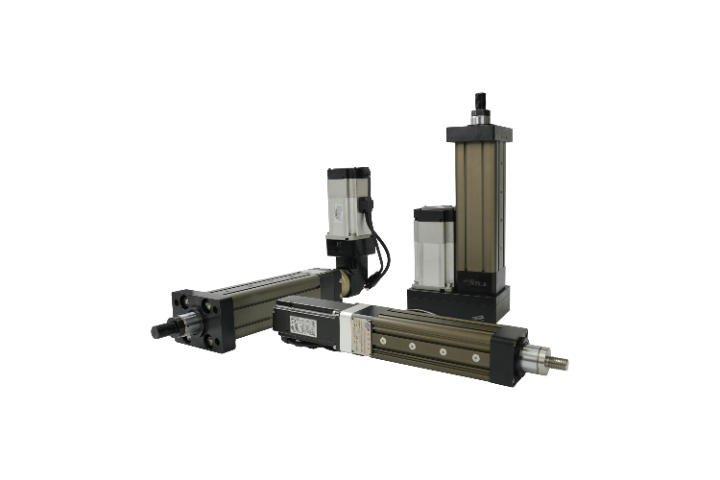
伺服電動缸作為工業自動化領域的中心組件,其作用在于將電能高效轉換為直線運動,實現機械部件的精確定位與運動控制。其工作原理基于伺服電機與絲杠機構的結合,伺服電機接收控制信號后旋轉,通過絲杠將旋轉運動轉換為直線運動,同時編碼器實時反饋位置信息,形成閉環控制,確保運動精度。在自動化裝配線、機器人手臂等場景中,伺服電動缸以其高精度、高響應速度,卓著提升了生產效率和產品質量。多級伺服電動缸通過多級伸縮結構,實現了在有限空間內的大行程運動,同時保持了高精度控制。其作用特別適用于需要長距離移動且對精度要求極高的應用,如航空航天領域的飛行器舵面控制。工作原理上,多級伺服電動缸的每一級都配備獨自的驅動和傳動機構,通過協同工作實現整體伸縮,同時采用高精度傳感器和先進的控制算法,確保運動過程中的精度和穩定性。
伺服電動缸作為工業自動化領域的中心組件,其作用在于將電能高效轉換為直線運動,實現機械部件的精確定位與運動控制。其工作原理基于伺服電機與絲杠機構的緊密結合,伺服電機接收控制信號后,驅動絲杠旋轉,進而將旋轉運動轉換為直線運動。通過閉環控制系統,伺服電動缸能夠實時反饋位置、速度和力的大小,確保運動精度和穩定性。在自動化裝配線、機器人手臂等場景中,伺服電動缸以其高精度、高響應速度,卓著提升了生產效率和產品質量,成為現代工業不可或缺的關鍵設備。耳軸伺服電動缸用于驅動耳軸旋轉,實現精確控制。

折返伺服電動缸通過特殊的機械結構,在有限空間內實現了往復直線運動,特別適用于對空間要求苛刻的場合。其作用在于節省空間的同時,保持高效的運動性能。工作原理上,折返伺服電動缸采用折返式絲杠或連桿機構,將電機的旋轉運動轉換為直線往復運動。這種設計不僅減小了整體尺寸,還通過優化機械結構提高了運動效率和穩定性,普遍應用于精密儀器、電子設備內部驅動等領域。六自由度伺服電動缸通過集成多個運動軸,實現了空間內任意方向和角度的運動控制,為機器人、仿真模擬等領域提供了高度靈活的運動解決方案。其作用在于構建復雜運動系統,滿足各種復雜任務的需求。工作原理上,六自由度伺服電動缸由多個獨自的伺服電動缸和旋轉關節組成,通過協同工作實現復雜的空間運動。這種設計使得機器人等設備能夠靈活應對各種復雜環境,提高了自動化水平和適應**流伺服電動缸采用交流電機,提供穩定動力輸出。鄭州旋轉伺服電動缸
石油化工伺服電動缸在惡劣環境中,確保生產安全。寧波食品伺服電動缸
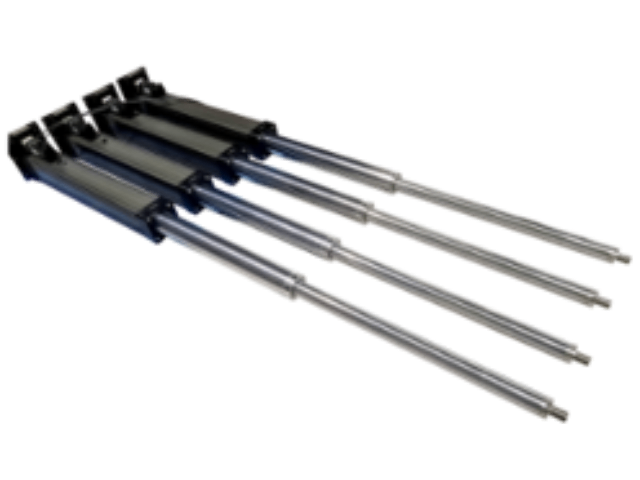
大噸位伺服電動缸以其強大的推力輸出,成為重載機械、大型設備驅動系統的優先選擇。其作用在于提供足夠的動力,確保設備在重載或高阻力環境下的穩定運行。工作原理上,大噸位伺服電動缸采用大功率伺服電機和強化型傳動機構,通過優化機械結構和控制算法提高推力輸出和穩定性。在重工機械領域,大噸位伺服電動缸用于驅動大型壓機、起重機等設備,實現重載物料的搬運和加工,提高了生產效率和安全性。人形機器人伺服電動缸在人形機器人領域發揮著至關重要的作用。其作用在于模擬人類關節的運動,實現機器人的靈活行走、抓取、操作等功能。工作原理上,人形機器人伺服電動缸采用高精度、高響應速度的伺服電機和傳動機構,結合先進的控制算法,實現關節的精確控制和協同運動。通過多個伺服電動缸的協同工作,人形機器人能夠完成復雜的動作和任務,為人工智能和機器人技術的發展提供了有力支持。寧波食品伺服電動缸
- 鋼鐵連鑄伺服電動缸性能 2025-05-30
- 長春人形機器人伺服電動缸 2025-05-30
- 東莞伺服電動缸結構 2025-05-30
- 西安重載伺服電動缸 2025-05-30
- 交流伺服電動缸設計報告 2025-05-30
- 藥品六自由度平臺系統 2025-05-30
- 貴州電缸設計報告 2025-05-30
- 簡易六自由度平臺加工 2025-05-30
- 寧波食品伺服電動缸 2025-05-30
- ddk伺服壓機費用 2025-05-30
- 電機水泵熱保護器現貨 2025-05-30
- 蘇州智能攪龍焊接機定制 2025-05-30
- 浙江空洞超聲掃描儀系統 2025-05-30
- 廣東高壓永磁電動滾筒砂石 2025-05-30
- 南京康宇多功能一體閥 2025-05-30
- 雨花臺區無影燈工藝 2025-05-30
- 氮氣防潮箱使用流程 2025-05-30
- 鋰電池彈簧片銷售廠 2025-05-30
- 上海移動式輸送機維修聯系方式 2025-05-30
- 溫州11千瓦減速機廠家 2025-05-30