河南光伏清洗機器人廠家
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統;2020:SUNBOT子母式跨陣列作業光伏清潔機器人;碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.德天智能清掃機器人憑借其高效率,智能的清掃能力,能夠很大程度減少光伏組件表面的灰塵和污垢!河南光伏清洗機器人廠家

國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.湖北光伏運維機器人多少錢這種機器人具備多種傳感器,如視覺傳感器,紅外傳感器等,可實時感知周圍環境!

光伏板清掃機器人發展前景預測的方法很多,主要有以下幾種:1、時間序列在光伏板清掃機器人發展前景預測中,經常遇到一系列依時間變化的經濟指標值,如光伏板清掃機器人企業產品按年(季)的銷售額、供給量等,這些按時間先后排列起來的一組數據稱為時間序列。依時間序列進行預測的方法稱為時間序列預測。2、回歸(1)“回歸”的含義。回歸是指用于分析、研究一個變量(因變量)與一個或幾個其它變量(自變量)之間的依存關系,其目的在于根據一組已知的自變量數據值,來估計或預測因變量的總體均值。在經濟預測中,人們把預測對象(經濟指標)作為因變量,把那些與預測對象密切相關的影響因素作為自變量。根據二者的歷史和統計資料,建立回歸模型,經過統計檢驗后用于預測。回歸預測有一個自變量的一元回歸預測和多個自變量的多元回歸預測,這里*討論一元線性回歸預測法。
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統;2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.可以清潔光伏板上表面的灰塵、污垢和鳥糞等污染物,提高光伏板的發電效率。
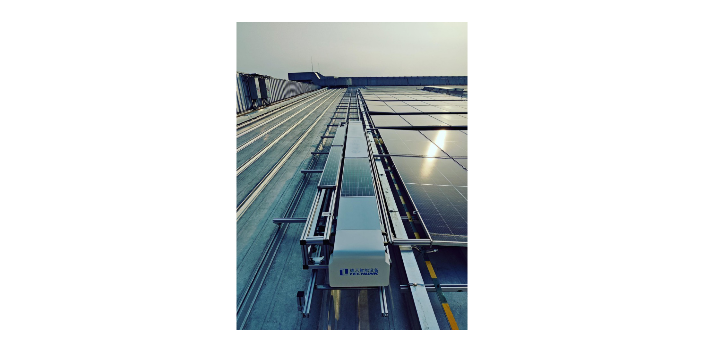
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.智能清掃機器人的小巧靈活的設計,能夠適應不同規格和安裝環境的光伏面板。湖北電站清洗機器人
通過定期地對光伏電池板進行清潔清掃,可顯著提高光伏發電量。河南光伏清洗機器人廠家
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人;碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.河南光伏清洗機器人廠家
- 黑龍江光伏清掃機器人 2025-05-11
- 安徽智能清洗機器人哪家好 2025-05-10
- 西藏運維機器人費用 2025-05-10
- 河北光伏運維機器人品牌 2025-05-10
- 新疆光伏清掃機器人報價表 2025-05-10
- 吉林電站清掃機器人費用 2025-05-10
- 天津智能清洗機器人多少錢 2025-05-10
- 湖北智能清洗機器人廠家價格 2025-05-10
- 江西光伏清掃機器人 2025-05-10
- 河北電站清洗機器人品牌 2025-05-10
- 虹口區節能氣缸廠家供應 2025-05-11
- 北京刀派克閥供應商 2025-05-11
- 昆明配電自動化設備 2025-05-11
- 安徽1000-1250T 全伺服簡易牽引機價格表 2025-05-11
- 浙江防掉刀刀柄現貨 2025-05-11
- 湖南微型帶導桿氣缸型號 2025-05-11
- 青海垂直提升設備定制 2025-05-11
- 陜西拉鉚螺母槍價格 2025-05-11
- 儀表氣源分配器報價 2025-05-11
- 山東4噸生物質鍋爐 2025-05-11