
北京隨機(jī)控制儀器 杭州銳達(dá)數(shù)字技術(shù)供應(yīng)
發(fā)貨地點(diǎn):浙江省杭州市
發(fā)布時(shí)間:2025-05-23

發(fā)貨地點(diǎn):浙江省杭州市
發(fā)布時(shí)間:2025-05-23
Spider隨機(jī)測(cè)試模式中的峭度用于隨機(jī)振動(dòng)的振幅分布。峭度,測(cè)試可以更好的模擬現(xiàn)實(shí)世界的環(huán)境。在現(xiàn)實(shí)世界中的許多振動(dòng)的環(huán)境中,信號(hào)都具有高峭度值的特征(相對(duì)于高斯隨機(jī))。這些環(huán)境中的振動(dòng)疲勞和損壞力比純高斯隨機(jī)信號(hào)高。因此,采用傳統(tǒng)的高斯隨機(jī)信號(hào)作為測(cè)試信號(hào)實(shí)際上只能在產(chǎn)品的服務(wù)環(huán)境中進(jìn)行測(cè)試。峭度可以用一個(gè)標(biāo)準(zhǔn)化的K值表示,這個(gè)值是由第四統(tǒng)計(jì)矩除以第二統(tǒng)計(jì)矩的平方得來(lái)。下面的等式為N個(gè)采樣點(diǎn)時(shí)的K值計(jì)算。 使用CoCo80設(shè)備狀態(tài)監(jiān)測(cè)儀器對(duì)風(fēng)力發(fā)電機(jī)組無(wú)線遠(yuǎn)程監(jiān)控。北京隨機(jī)控制儀器
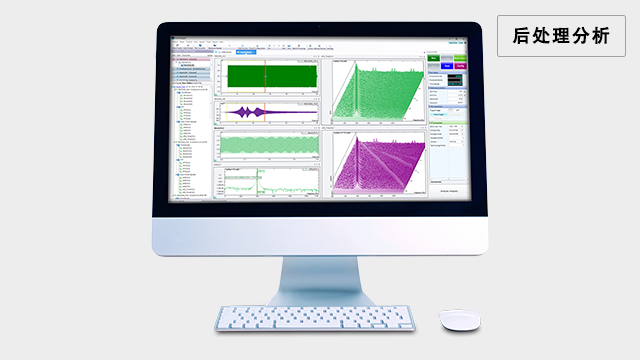
COCO-80X提供了實(shí)時(shí)分析功能,包括變焦光譜,文件導(dǎo)出,F(xiàn)IR和IIR數(shù)字濾波器,柱狀圖,統(tǒng)計(jì),階次,分?jǐn)?shù)倍頻分析,聲度表,轉(zhuǎn)子平衡,振動(dòng)強(qiáng)度,模態(tài)數(shù)據(jù)采集,自動(dòng)測(cè)試和限制檢查,正弦掃頻,沖擊響應(yīng)譜和基于振動(dòng)數(shù)據(jù)采集功能。CoCo-80X的硬件平臺(tái)支持動(dòng)態(tài)信號(hào)分析儀(DSA)。每個(gè)工作模式有其自己的用戶界面和導(dǎo)航結(jié)構(gòu)。DSA模式是專為結(jié)構(gòu)分析和力學(xué)性能試驗(yàn)而設(shè)計(jì)的。它被廣泛應(yīng)用到電氣測(cè)量,聲學(xué)分析,以及其它應(yīng)用中。可以通過(guò)因特網(wǎng)下載進(jìn)行固件更新或者當(dāng)沒(méi)有因特網(wǎng)時(shí)還可以通過(guò)SD卡下載更新。CoCo-80X支持可動(dòng)態(tài)切換多種語(yǔ)言。它配備了英語(yǔ),日本,法語(yǔ)和西班牙語(yǔ)。 路譜控制供應(yīng)商地震波試驗(yàn)提供用以滿足目標(biāo)響應(yīng)譜。
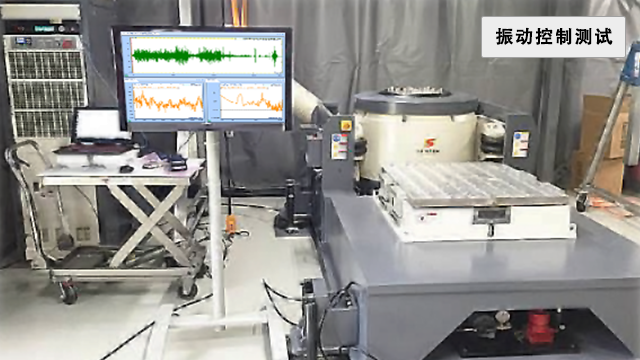
MIMO振動(dòng)器Spider-80M基于流行的Spider-80Xi機(jī)架構(gòu)建,主要應(yīng)用于MIMO振動(dòng)和MIMO結(jié)構(gòu)測(cè)試,支持單軸及三軸六自由度振動(dòng)臺(tái)。在一個(gè)Spider-80M多軸器硬件機(jī)箱中,總要安裝一個(gè)帶有8個(gè)輸入和8個(gè)輸出的主模塊,這個(gè)主模塊在機(jī)箱中占用兩個(gè)插槽空間。可以裝入**多6個(gè)額外的Spider-80Xi前端模塊,形成一個(gè)具有8個(gè)輸出和56個(gè)輸入的系統(tǒng)。多個(gè)Spider-80M多輸入多輸出器或Spider-80Xi高通道振動(dòng)測(cè)試系統(tǒng)可以鏈接在一起,形成一個(gè)非常大的系統(tǒng),擁有高達(dá)504個(gè)輸入通道,全部同時(shí)采樣。
在過(guò)去十年中,隨著多振動(dòng)臺(tái)系統(tǒng)的發(fā)展、多輸入多輸出MIMO器的可用性以及標(biāo)準(zhǔn)(例如,IESTDTE022工作組建議的MilSTD810G方法527)的制定,MIMO振動(dòng)系統(tǒng)獲得了巨大的發(fā)展勢(shì)頭。多振動(dòng)臺(tái)試驗(yàn)系統(tǒng)已經(jīng)被用在***、**和航天領(lǐng)域,以及商業(yè)和汽車(chē)工業(yè)。在現(xiàn)實(shí)世界中,結(jié)構(gòu)振動(dòng)是從各個(gè)方向的來(lái)源被激發(fā)的。為了模擬真實(shí)的振動(dòng)環(huán)境,需要同時(shí)在多個(gè)方向上執(zhí)行激勵(lì)。MIMO試驗(yàn)對(duì)于許多應(yīng)用是必要的,例如大型結(jié)構(gòu)測(cè)試,*使用單個(gè)振動(dòng)無(wú)法提供安裝或者足夠的推力,以及試驗(yàn)要求同時(shí)進(jìn)行多軸向振動(dòng)激勵(lì)時(shí)。SDOF測(cè)試不足以滿足規(guī)范要求正確分配的振動(dòng)能量時(shí),建議進(jìn)行MIMO測(cè)試。具有同時(shí)多方向激勵(lì)的MIMO試驗(yàn),可以減少總測(cè)試時(shí)間,因?yàn)槭∪チ烁淖僁UT在工作臺(tái)的固定方向(例如,從垂直到水平)的時(shí)間。一般而言,MIMO試驗(yàn)可以在情況下向測(cè)試物件多個(gè)軸向提供振動(dòng)能量的分布,而不依賴于測(cè)試物件的動(dòng)態(tài)特性來(lái)實(shí)現(xiàn)這種分布。對(duì)于長(zhǎng)細(xì)物理構(gòu)造的測(cè)試物件,采用單個(gè)振動(dòng)臺(tái)試驗(yàn)時(shí)必須依賴于測(cè)試物件的動(dòng)力學(xué)特性來(lái)分配能量。對(duì)于大型和重型試驗(yàn)物品,可能需要一個(gè)以上的振動(dòng)臺(tái)來(lái)為試驗(yàn)項(xiàng)目提供足夠的能量。MIMO試驗(yàn)允許在更多自由度上匹配測(cè)試物品的阻抗和邊界使用條件。 使用CoCo-80X對(duì)橋梁結(jié)構(gòu)進(jìn)行振動(dòng)測(cè)試。
銳達(dá)振動(dòng)測(cè)試系統(tǒng)的信號(hào)的總諧波失真(THD)是對(duì)存在的諧波失真的測(cè)量,并且定義為所有諧波分量的功率之和與基頻功率之比。在EDM正弦掃頻測(cè)試中,可以通過(guò)選中“測(cè)試參數(shù)”選項(xiàng)卡下的“設(shè)置”下的選項(xiàng)來(lái)啟用掃描THD。正弦發(fā)生器(正弦振蕩器)是振動(dòng)臺(tái)的診斷工具,允許用戶手動(dòng)輸出正弦波的頻帶和驅(qū)動(dòng)電壓。它也有一個(gè)內(nèi)置的閉環(huán),使得它可以作為一個(gè)簡(jiǎn)單的正弦波器。當(dāng)新的測(cè)試被調(diào)用時(shí),如果閉環(huán)被啟用,那么測(cè)試會(huì)要求你設(shè)置了目標(biāo)譜,以便閉環(huán),可以進(jìn)行。啟用閉環(huán),該系統(tǒng)實(shí)際上是一個(gè)簡(jiǎn)單的正弦振動(dòng)系統(tǒng)。如果未選中此復(fù)選框,系統(tǒng)將在開(kāi)環(huán)模式下運(yùn)行。正弦掃頻測(cè)試的正弦振蕩模式允許用戶手動(dòng)設(shè)置輸出正弦波。可控參數(shù)包括頻率,幅值,掃描速率,頻率范圍和方向。當(dāng)手動(dòng)時(shí),與普通正弦掃頻測(cè)試不同,正弦輸出不受閉環(huán)。啟用閉環(huán),它可以作為一個(gè)簡(jiǎn)單的正弦振動(dòng)器。 三軸同步核電零部件測(cè)量。遼寧隨機(jī)控制儀器
動(dòng)力電池路況全模擬振動(dòng)測(cè)試。北京隨機(jī)控制儀器
沖擊響應(yīng)譜(SRS)是一個(gè)瞬態(tài)加速度脈沖可能對(duì)結(jié)構(gòu)造成破壞的圖示。它繪制了一組單自由度(SDOF)彈簧的峰值加速度響應(yīng),就像在剛性無(wú)質(zhì)量的基礎(chǔ)上一樣,質(zhì)量阻尼器系統(tǒng)都經(jīng)歷相同的基本激勵(lì)。每個(gè)SDOF系統(tǒng)具有不同的固有頻率;它們都有相同的粘滯阻尼因子。頻譜的結(jié)果是在固有頻率(水平方向)上繪制峰值加速度(垂直)得出的。一個(gè)SRS是由一個(gè)沖擊波產(chǎn)生,使用以下過(guò)程:SRS的阻尼比(5%是最常見(jiàn)的)使用數(shù)字濾波器模擬頻率單自由度、fn和阻尼ξ。應(yīng)用瞬態(tài)作為輸入,計(jì)算響應(yīng)加速度波形。保留在脈沖持續(xù)時(shí)間和之后的峰值正負(fù)響應(yīng)。選擇其中一個(gè)極值,并將其繪制成fn的頻譜振幅。對(duì)每個(gè)(對(duì)數(shù)間隔)fn重復(fù)這些步驟。由此產(chǎn)生的峰值加速度與彈簧-質(zhì)量阻尼系統(tǒng)固有頻率的曲線稱為沖擊響應(yīng)譜,簡(jiǎn)稱SRS。北京隨機(jī)控制儀器




